
I am a researcher at FANUC, the world’s leading manufacturer of industrial robots. I earned my Ph.D. from UC Berkeley in December 2024, where I was advised by Professor Masayoshi Tomizuka. My research focuses on robotic manipulation—specifically, how robots can actively perceive their environment, leverage prior experience to plan motions, and interact with their surroundings through intelligent contact, dexterity, and precision.
News
- Jan 2026: Paper “DexCtrl: Sim-to-Real Dexterity with Adaptive Controller Learning” accepted by ICRA 2026.
- Nov 2024: We are organizing Workshop on Learning Robotic Assembly of Industrial and Everyday Objects @ CoRL 2024.
- Nov 2024: I joined FANUC Advanced Research Lab at Union City.
- Oct 2024: our paper “Harnessing with Twisting: Single-Arm Deformable Linear Object Manipulation for Industrial Harnessing Task,” is awarded Best Paper in Industrial Robotics Research for Application at IROS 2024
- Jan 2024: Our paper “Bridging the Sim-to-Real Gap with Dynamic Compliance Tuning for Industrial Insertion” (website) is accepted by ICRA 2024.
- Aug 2023: Our paper “Efficient Sim-to-real Transfer of Contact-Rich Manipulation Skills with Online Admittance Residual Learning” (website) is accepted by CoRL 2023.
- Aug 2023: I am selected for DSCD Rising Stars Invited Talks at MECC 2023
Research
DexCtrl: Sim-to-Real Dexterity with Adaptive Controller Learning
Shuqi Zhao, Ke Yang, Yuxin Chen, Chenran Li, Yichen Xie, Xiang Zhang, Changhao Wang, Masayoshi Tomizuka
ICRA 2026
[Paper]

Autonomous Robotic Assembly of a Skateboard Truck
Yotto Koga, Hui Li, Xiang Zhang, Yunsheng Tian, Adam Arnold, James Emerick, Nic Carey, Srinidhi Srinivas, Nick Cote, Michael Koehle, Stefanie Pender, Noa Kaplan, Annabella Macaluso, Gadiel Sznaier Camps, Ozguc Capunaman, Gabrielle Patin, Hans Kellner, Sachin Chitta
Autodesk Research Demo




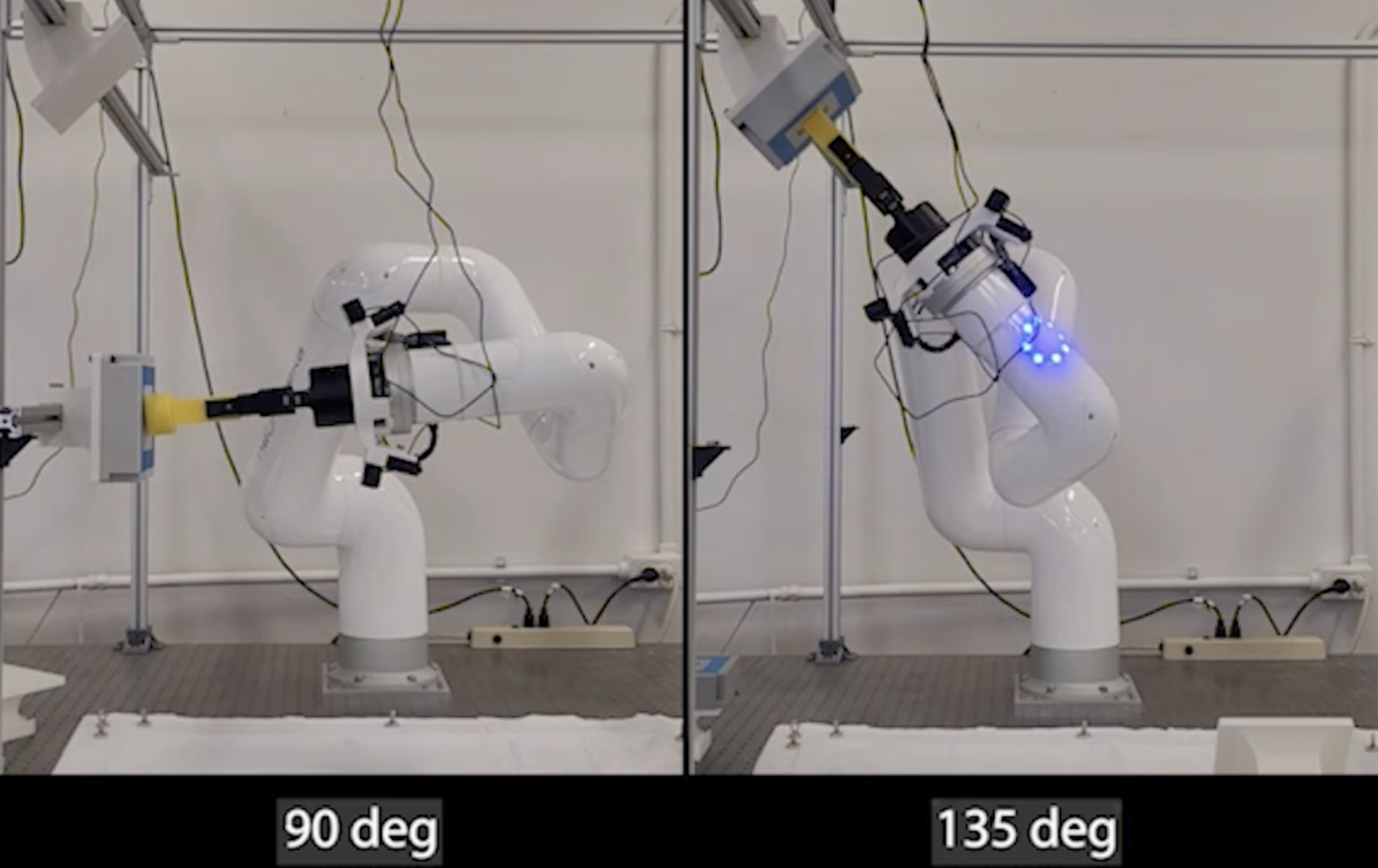
Learning Generalizable Pivoting Skills
Xiang Zhang, Siddarth Jain, Baichuan Huang, Masayoshi Tomizuka, Diego Romeres
ICRA 2023
[Paper]





